The Touch Sensors
We'll start by soldering the connectors for the two touch sensors of the robot !
The connection
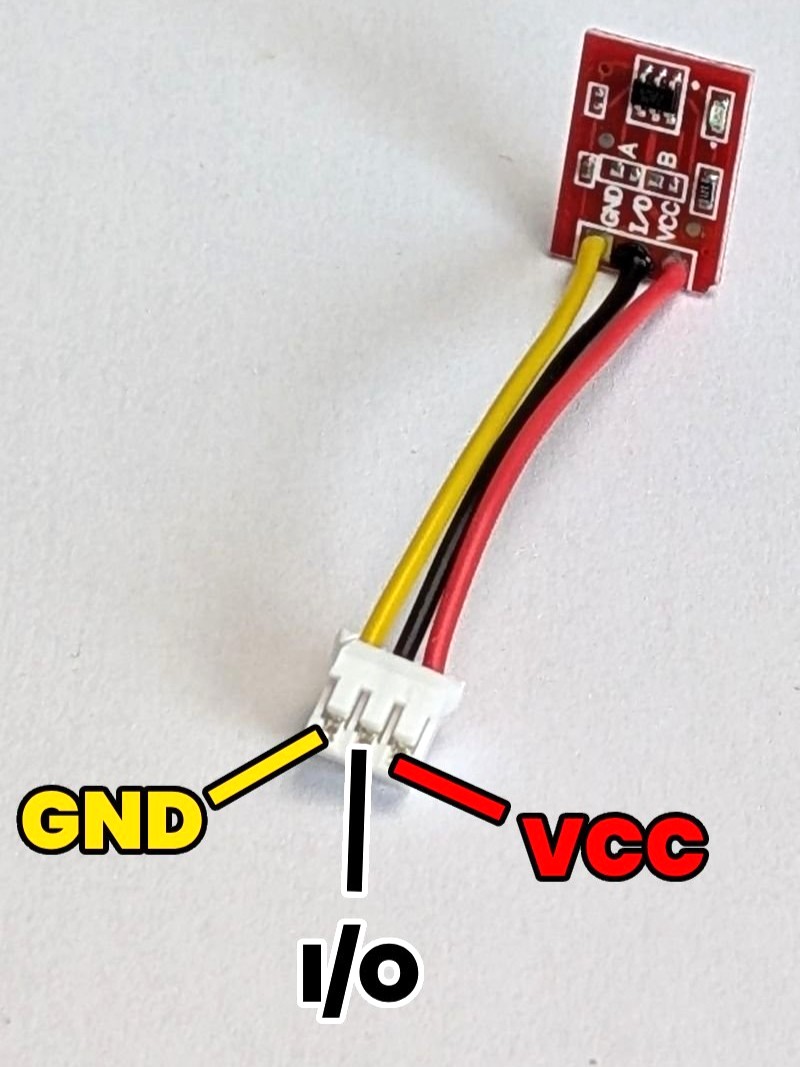
The connections are pretty straight forward, since the connectors use the same pin order as the touch sensors :
- GND: The ground. (which is the pin most to the left)
- I/O: The signal pin. (which is the pin in the middle)
- VCC: The power supply. (which is the pin most to the right)
(don't pay attention to the color of the wires in the picture, they are not standardized)
An ideal length for the touch sensor cables is around 5cm to 10cm, so you get some slack to connect the touch sensors easily, while avoiding having a lot of excess cable inside the head when assembled.
Once the two touch sensors are soldered to their connectors, you can move on to the next step !